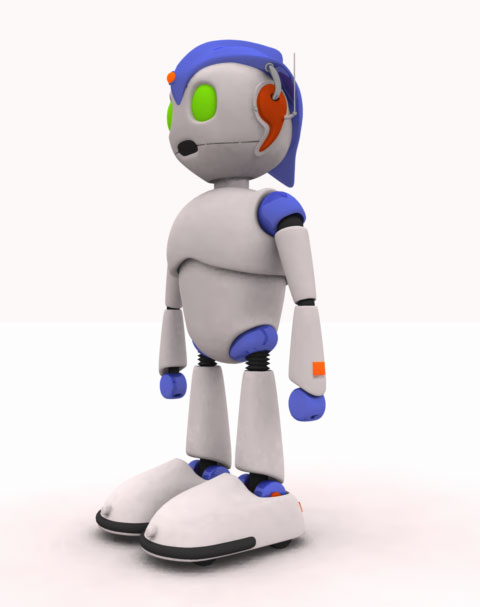
 以前に作ったSTRATAのロボをCARRARAで作り直しています。(まだ完成してないけど)これも登場させようかな…ってね。
以前に作ったSTRATAのロボをCARRARAで作り直しています。(まだ完成してないけど)これも登場させようかな…ってね。
随分前に六角で作ったポリゴンを今見るとちょっぴり甘いところがありますねー。六角でのエッジの扱いとCARRARAでは違うので微調整も必要です。(ローポリで読み込んでいるので)
で、このロボ足は曲げられません。見ればわかりますね。段差なんてない場所にいるんだけど、もし階段に直面したらどうなるのか…。jumpですかねー。(^^;)
リメイク ロボ
 Flash
Flash
コメント
>脚底にタイヤを搭載して直進/後進する
そうですそうです、そういう移動の仕方をします。R2D2タイプですね。
戦闘用じゃないのでこれで十分だと思ってます。
め、、、、めんこい、、、、。
この状態だと脚は可動しないで、
脚底にタイヤを搭載して直進/後進する
タイプになりそうですね。
もしそういう場面になったらこの手でいくか…
急いでる時はやっぱジャンプやな。(^_^)
可(^o^
つま先立ちですか!!不安定そーー
足首部分のシリンダーが延びるっていうのはどうかな…
くるぶしを膝関節としつま先立ちでOK!